




速度制御・位置制御・トルク制限ができる最高水準のブラシレスモーター
速度制御モーターの最高峰BXⅡシリーズ。
速度制御、位置制御、トルク制限などさまざまなシーンで活躍します。
このカタログについて
| ドキュメント名 | ブラシレスモーター BXIIシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 5.8Mb |
| 関連製品 | |
| 登録カテゴリ | |
| 取り扱い企業 | オリエンタルモーター株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
ブラシレスモーター
BXⅡシリーズ
速度制御・位置制御・トルク制限ができる
最高水準のブラシレスモーター
Page2
速度制御モーターの最高峰 BXⅡシリーズ。
速度制御、位置制御、トルク制限などさまざまなシーンで活躍します。
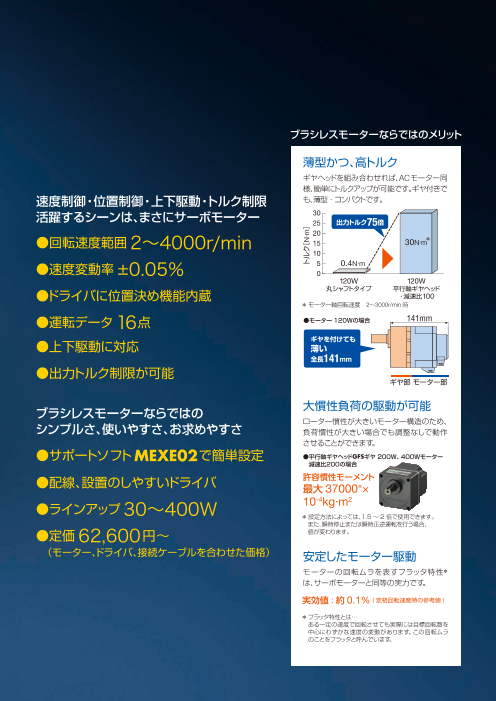
ブラシレスモーターならではのメリット
薄型かつ、高トルク
ギヤヘッドを組み合わせれば、ACモーター同
様、簡単にトルクアップが可能です。ギヤ付きで
速度制御・位置制御・上下駆動・トルク制限 も、薄型・コンパクトです。
活躍するシーンは、まさにサーボモーター 30
25 出力トルク75倍
20
●回転速度範囲2~4000r/min *
15 30N.m
10
●速度変動率±0.05% 5 0.4N.m
0
120W 120W
丸シャフトタイプ 平行軸ギヤヘッド
●ドライバに位置決め機能内蔵 ・減速比100
* モーター軸回転速度 2~3000r/min時
●運転データ16点 ●モーター120Wの場合 141mm
ギヤを付けても
●上下駆動に対応 薄い
全長141mm
●出力トルク制限が可能
ギヤ部 モーター部
ブラシレスモーターならではの 大慣性負荷の駆動が可能
ローター慣性が大きいモーター構造のため、
シンプルさ、使いやすさ、お求めやすさ 負荷慣性が大きい場合でも調整なしで動作
させることができます。
●サポートソフト MEXE02で簡単設定 ●平行軸ギヤヘッドGFSギヤ 200W、400Wモーター
減速比200の場合
●配線、設置のしやすいドライバ 許容慣性モーメント
最大 37000*×
10-4kg.m2
●ラインアップ30~400W * 設定方法によっては、1.5~ 2倍で使用できます。
また、瞬時停止または瞬時正逆運転を行う場合、
●定価62,600円~ 値が変わります。
(モーター、ドライバ、接続ケーブルを合わせた価格) 安定したモーター駆動
モーターの回転ムラを表すフラッタ特性*
は、サーボモーターと同等の実力です。
実効値 :約 0.1% ( 定格回転速度時の参考値 )
BXⅡSeries * フラッタ特性とは…
ある一定の速度で回転させても実際には目標回転数を
中心にわずかな速度の変動があります。この回転ムラ
のことをフラッタと呼んでいます。
トルク[N.m]
Page3
速度制御モーターの最高峰 BXⅡシリーズ。
速度制御、位置制御、トルク制限などさまざまなシーンで活躍します。
ブラシレスモーターならではのメリット
薄型かつ、高トルク
ギヤヘッドを組み合わせれば、ACモーター同
様、簡単にトルクアップが可能です。ギヤ付きで
速度制御・位置制御・上下駆動・トルク制限 も、薄型・コンパクトです。
活躍するシーンは、まさにサーボモーター 30
25 出力トルク75倍
20
●回転速度範囲2~4000r/min *
15 30N.m
10
●速度変動率±0.05% 5 0.4N.m
0
120W 120W
丸シャフトタイプ 平行軸ギヤヘッド
●ドライバに位置決め機能内蔵 ・減速比100
* モーター軸回転速度 2~3000r/min時
●運転データ16点 ●モーター120Wの場合 141mm
ギヤを付けても
●上下駆動に対応 薄い
全長141mm
●出力トルク制限が可能
ギヤ部 モーター部
ブラシレスモーターならではの 大慣性負荷の駆動が可能
ローター慣性が大きいモーター構造のため、
シンプルさ、使いやすさ、お求めやすさ 負荷慣性が大きい場合でも調整なしで動作
させることができます。
●サポートソフト MEXE02で簡単設定 ●平行軸ギヤヘッドGFSギヤ 200W、400Wモーター
減速比200の場合
●配線、設置のしやすいドライバ 許容慣性モーメント
最大 37000*×
10-4kg.m2
●ラインアップ30~400W * 設定方法によっては、1.5~ 2倍で使用できます。
また、瞬時停止または瞬時正逆運転を行う場合、
●定価62,600円~ 値が変わります。
(モーター、ドライバ、接続ケーブルを合わせた価格) 安定したモーター駆動
モーターの回転ムラを表すフラッタ特性*
は、サーボモーターと同等の実力です。
実効値 :約 0.1% ( 定格回転速度時の参考値 )
BXⅡSeries * フラッタ特性とは…
ある一定の速度で回転させても実際には目標回転数を
中心にわずかな速度の変動があります。この回転ムラ
のことをフラッタと呼んでいます。
トルク[N.m]
Page4
速度制御・位置制御・上下駆動・トルク制限、
活躍するシーンは、まさにサーボモーター。 BXⅡSeries
機能・性能がアップしながら、お求めやすい価格を実現しました。
速度制御 上下駆動・位置保持
すべての機種において、電磁ブレーキの有無を選択できます。
広い速度制御範囲 2~4000r/min✽ 0.8
速度比1:2000を実現しました。 短時間運転領域
低速から高速まで、一定のトルクを必要とする用途に適しています。 上下駆動(巻き下げ運転)に対応
0.4
✽デジタル設定時。アナログ設定時は30~4000r/minです。 連続運転領域 電磁ブレーキ付なら、上下駆動時にも、安定した速度制御ができます。
速度制御範囲 2∼4000r/min (別売の回生抵抗を使用します。)
優れた速度変動率 ±0.05%✽ 0 2 1000 2000 3000 4000 W(重量)
(30) 回転速度[r/min]
周囲環境(負荷、電圧、温度など)にかかわらず、安定した速度で回転します。 停止時の位置保持が可能
[ 出力 120 Wの場合 ]
✽定格回転速度 3000r/min のとき。 垂直方向、水平方向駆動時の位置保持が可能です。
No.7 (水平方向駆動の場合は、通電時にサーボロックで保持することもできます。)
No.6 ワー
最大16速の多段速運転に対応 No.5 ク
No.4
No.3
No.2
ドライバに速度データを設定し、入力信号で切り替えができます。 非常時に、ワークの落下を防止
No.1
No.0
モーターの動き 電磁ブレーキは無励磁作動型のため、停電などで通電が切れた場合も自動ではたらきます。
ON
FWD入力 OFF モーターを瞬時に停止し、ワークの落下を防ぎます。
ON
M2入力
OFF
ON
M1入力 OFF
ON
M0入力
OFF
位置制御 トルク制限
I/Oだけで、最大16点のデータを運転・切り替え 張力(ブレーキ)、押し当て(プレス) 、締め付けなど、トルクや張力の調整が必要な用途に使用できます。
移動量、運転速度などの運転データを、最大16点まで、ドライバに設定できます。 ●トルク制限精度 ±10%程度 ●張力(ブレーキ) ●押し当て
運転指令や運転データの切り替えに、位置決めユニットは不要です。 運転データ No.0 ( 定格トルク、定格回転速度時) 張力を得るためのブレーキ 印字などの
CPU 運転データ No.1 として使用 プレス用途
●トルク制限ON/OFFを外部信号
電源 運転データ No.2 で使用
I/O
・ ( TL 入力)で切り替え可能
・
I/O 運転データ No.15
張力
位置決め
ユニット
不要
トルク制限機能とは?
●複数の運転データを連結 単独運転 速度
運転データ 運転データ モーターの瞬時最大トルクの設定範囲 瞬時最大 トルク制限設定値
単独のデータ設定以外に、複数の運転データを組み合わせる、 No.0 No.1 を0 ~250%まで1%単位で制限でき トルク
連結運転も設定できます。モーターを動かしたまま、任意のポイ 起動 時間
ます。安全のために、トルクを抑えたい
ントで変速させることもできます。 指令
ときにも役立ちます。
連結運転 速度
運転データ 運転データ
No.0 No.1 トルク制限
起動 時間
指令 50%設定時
4 5
I/O
トルク[N・m]
Page5
速度制御・位置制御・上下駆動・トルク制限、
活躍するシーンは、まさにサーボモーター。 BXⅡSeries
機能・性能がアップしながら、お求めやすい価格を実現しました。
速度制御 上下駆動・位置保持
すべての機種において、電磁ブレーキの有無を選択できます。
広い速度制御範囲 2~4000r/min✽ 0.8
速度比1:2000を実現しました。 短時間運転領域
低速から高速まで、一定のトルクを必要とする用途に適しています。 上下駆動(巻き下げ運転)に対応
0.4
✽デジタル設定時。アナログ設定時は30~4000r/minです。 連続運転領域 電磁ブレーキ付なら、上下駆動時にも、安定した速度制御ができます。
速度制御範囲 2∼4000r/min (別売の回生抵抗を使用します。)
優れた速度変動率 ±0.05%✽ 0 2 1000 2000 3000 4000 W(重量)
(30) 回転速度[r/min]
周囲環境(負荷、電圧、温度など)にかかわらず、安定した速度で回転します。 停止時の位置保持が可能
[ 出力 120 Wの場合 ]
✽定格回転速度 3000r/min のとき。 垂直方向、水平方向駆動時の位置保持が可能です。
No.7 (水平方向駆動の場合は、通電時にサーボロックで保持することもできます。)
No.6 ワー
最大16速の多段速運転に対応 No.5 ク
No.4
No.3
No.2
ドライバに速度データを設定し、入力信号で切り替えができます。 非常時に、ワークの落下を防止
No.1
No.0
モーターの動き 電磁ブレーキは無励磁作動型のため、停電などで通電が切れた場合も自動ではたらきます。
ON
FWD入力 OFF モーターを瞬時に停止し、ワークの落下を防ぎます。
ON
M2入力
OFF
ON
M1入力 OFF
ON
M0入力
OFF
位置制御 トルク制限
I/Oだけで、最大16点のデータを運転・切り替え 張力(ブレーキ)、押し当て(プレス) 、締め付けなど、トルクや張力の調整が必要な用途に使用できます。
移動量、運転速度などの運転データを、最大16点まで、ドライバに設定できます。 ●トルク制限精度 ±10%程度 ●張力(ブレーキ) ●押し当て
運転指令や運転データの切り替えに、位置決めユニットは不要です。 運転データ No.0 ( 定格トルク、定格回転速度時) 張力を得るためのブレーキ 印字などの
CPU 運転データ No.1 として使用 プレス用途
●トルク制限ON/OFFを外部信号
電源 運転データ No.2 で使用
I/O
・ ( TL 入力)で切り替え可能
・
I/O 運転データ No.15
張力
位置決め
ユニット
不要
トルク制限機能とは?
●複数の運転データを連結 単独運転 速度
運転データ 運転データ モーターの瞬時最大トルクの設定範囲 瞬時最大 トルク制限設定値
単独のデータ設定以外に、複数の運転データを組み合わせる、 No.0 No.1 を0 ~250%まで1%単位で制限でき トルク
連結運転も設定できます。モーターを動かしたまま、任意のポイ 起動 時間
ます。安全のために、トルクを抑えたい
ントで変速させることもできます。 指令
ときにも役立ちます。
連結運転 速度
運転データ 運転データ
No.0 No.1 トルク制限
起動 時間
指令 50%設定時
4 5
I/O
トルク[N・m]
Page6
小型・薄型化を実現したドライバは、本体だけでデジタル設定・操作が可能。
使いやすさと信頼性をそなえ、充実のラインアップでお届けします。 BXⅡSeries
立ち上げからメンテナンスまでをサポート ラインアップ
コンピュータ上で、簡単設定・簡単立ち上げ ●モーター ●ドライバ ●ケーブル✽4
サポートソフト MEXE02から、運転データやパラメータの設定、モニタ、ティーチングをおこなえます。 出力軸 出力 取付角 出力
MEXE02は、当社WEBサイトからダウンロードできます。( 別売の専用ケーブルが必要です。) タイプ✽1 寸法 減速比✽2 種類
[W] [mm] [W]
30 60 30 接続ケーブル
0.3m~30.3m
平行軸ギヤヘッド
GFSギヤ 可動接続ケーブル
60 80 60 1.3m~30.3m
5、10、
15、20、
[ 運転データの設定 ] [ 波形モニタ ]
120 90 30、50、 120
100、
現場でのモニタ、トラブルシューティングも可能 モーター用
中空軸フラットギヤヘッド 200
ドライバの表示画面で速度やアラーム情報をモニタできます。操作パネルでのデータ設定、テスト運転も可能です。 FRギヤ
200 200
データ設定器 OPX-2Aを接続すれば、さらに操作がしやすくなります。
104✽3
データ設定器 エンコーダ用
OPX-2A(別売) 400 400 モーター用、エンコーダ用が
丸シャフトタイプ 2本セットになっています。
✽1 各タイプに電磁ブレーキ付をご用意しています。
[ アラームコード表示 ] [ 負荷率表示 ] ✽2 丸シャフトタイプを除く。中空軸フラットギヤヘッド FRギヤの200 Wは減速比 10~ 100、400 Wは減速比 5~ 100です。
✽3 ギヤヘッド部は110 mmです。
✽4 モーターから出ているモーターケーブルおよびエンコーダケーブルは、ドライバに直接接続できません。
接続ケーブルまたは可動接続ケーブルを必ずご購入ください。
配線、設置のしやすいスマートなドライバ 中空軸フラットギヤヘッドで、さらに高トルク、省スペース化
ギヤケース剛性の向上と歯車および軸受の大径化を図り、高許容トルクを実現しました。
モーターコネクタはワンタッチ式、I/Oコネクタはスクリューレスのため、ねじ止めやはんだ付けは不要です。 相手軸と直結できる中空軸タイプのため、連結部品を削減できます。
ドライバ本体は密着取付に対応し、制御盤内の省スペース化に貢献します。
●飽和しない許容トルク ●省スペース、省コスト
[平行軸ギヤヘッド] [中空軸フラットギヤヘッド]
80
モーターコネクタ 中空軸フラットギヤヘッド 部品削減
60
ワンタッチ接続 連
カップ 結
40
平行軸ギヤヘッド リング ス ギヤヘッド部
ペ
ー
I/Oコネクタ 20 ス
モーター部
オレンジ色のボタンを ギヤヘッド部
0
ドライバなどで 100 200
押しながら、リード線 減速比
を差し込むだけ [取付角寸法90 mmの場合 ] モーター部 省スペース
[ 密着取付のイメージ ]
6 7
許容トルク [N・m]
Page7
小型・薄型化を実現したドライバは、本体だけでデジタル設定・操作が可能。
使いやすさと信頼性をそなえ、充実のラインアップでお届けします。 BXⅡSeries
立ち上げからメンテナンスまでをサポート ラインアップ
コンピュータ上で、簡単設定・簡単立ち上げ ●モーター ●ドライバ ●ケーブル✽4
サポートソフト MEXE02から、運転データやパラメータの設定、モニタ、ティーチングをおこなえます。 出力軸 出力 取付角 出力
MEXE02は、当社WEBサイトからダウンロードできます。( 別売の専用ケーブルが必要です。) タイプ✽1 寸法 減速比✽2 種類
[W] [mm] [W]
30 60 30 接続ケーブル
0.3m~30.3m
平行軸ギヤヘッド
GFSギヤ 可動接続ケーブル
60 80 60 1.3m~30.3m
5、10、
15、20、
[ 運転データの設定 ] [ 波形モニタ ]
120 90 30、50、 120
100、
現場でのモニタ、トラブルシューティングも可能 モーター用
中空軸フラットギヤヘッド 200
ドライバの表示画面で速度やアラーム情報をモニタできます。操作パネルでのデータ設定、テスト運転も可能です。 FRギヤ
200 200
データ設定器 OPX-2Aを接続すれば、さらに操作がしやすくなります。
104✽3
データ設定器 エンコーダ用
OPX-2A(別売) 400 400 モーター用、エンコーダ用が
丸シャフトタイプ 2本セットになっています。
✽1 各タイプに電磁ブレーキ付をご用意しています。
[ アラームコード表示 ] [ 負荷率表示 ] ✽2 丸シャフトタイプを除く。中空軸フラットギヤヘッド FRギヤの200 Wは減速比 10~ 100、400 Wは減速比 5~ 100です。
✽3 ギヤヘッド部は110 mmです。
✽4 モーターから出ているモーターケーブルおよびエンコーダケーブルは、ドライバに直接接続できません。
接続ケーブルまたは可動接続ケーブルを必ずご購入ください。
配線、設置のしやすいスマートなドライバ 中空軸フラットギヤヘッドで、さらに高トルク、省スペース化
ギヤケース剛性の向上と歯車および軸受の大径化を図り、高許容トルクを実現しました。
モーターコネクタはワンタッチ式、I/Oコネクタはスクリューレスのため、ねじ止めやはんだ付けは不要です。 相手軸と直結できる中空軸タイプのため、連結部品を削減できます。
ドライバ本体は密着取付に対応し、制御盤内の省スペース化に貢献します。
●飽和しない許容トルク ●省スペース、省コスト
[平行軸ギヤヘッド] [中空軸フラットギヤヘッド]
80
モーターコネクタ 中空軸フラットギヤヘッド 部品削減
60
ワンタッチ接続 連
カップ 結
40
平行軸ギヤヘッド リング ス ギヤヘッド部
ペ
ー
I/Oコネクタ 20 ス
モーター部
オレンジ色のボタンを ギヤヘッド部
0
ドライバなどで 100 200
押しながら、リード線 減速比
を差し込むだけ [取付角寸法90 mmの場合 ] モーター部 省スペース
[ 密着取付のイメージ ]
6 7
許容トルク [N・m]
Page8
"システム構成
モーター、ギヤヘッド、ドライバ、接続ケーブルは、別手配です。
BX シリーズ 周辺機器(別売)
モーター データ設定器 サポートソフト用
➜ 41ページ
ギヤヘッド 接続ケーブル、可動接続ケーブル ドライバ 通信ケーブル
➜ 41ページ
必須 最大延長距離:30.7 m
または
USB
ポートへ
プログラマブル
コントローラ✽
AC電源
モーター用 エンコーダ用 (主電源)
モーター用とエンコーダ用が2本セットに コンピュータ✽
なっています。
サポートソフト
MEXE02
ケーブル・周辺機器(別売)
フレキシブル 接続ケーブル(中継用)、 入出力信号用
カップリング 取付金具 可動接続ケーブル(中継用) ケーブル 電源ケーブル
➜ 42ページ ➜ 42ページ ➜ 39ページ ➜ 40ページ ➜ 40ページ
フランジ出力ヘッド ➜ 42ページ 回生抵抗 DINレール
取付金具 外部速度設定器
モーター出力120W平行軸ギヤヘッドに
➜ 42ページ ➜ 42ページ ➜ 41ページ
お使いいただけます。
✽ お客様にてご用意ください。
●サポートソフトMEXE02は、当社WEBサイトからダウンロードできます。
本製品の操作方法を記載した取扱説明書をご用意しています。詳細については、お近くの支店、営業所にお問い合わせいただくか、
当社WEBサイトからダウンロードしてください。https://www.orientalmotor.co.jp/ja
●システム構成価格例
周辺機器
モーター ギヤヘッド ドライバ 接続ケーブル
(3.3 m) 取付金具 フレキシブル
カップリング
BXM6200-GFS GFS6G50 BXSD200-A2 CC033SBF2 SOL6M8 MCL652222
36,800円 20,000円 37,900円 10,300円 3,200円 9,600円
● 上記システム構成は一例です。 他の組み合わせもございます。
ご注意
● モーターから出ているモーターケーブルおよびエンコーダケーブルは、ドライバに直接接続できません。
接続ケーブルまたは可動接続ケーブルを必ずご購入ください。
8
Page9
"品名の見方
● モーター
BXM 5 120 M-GFS ① モーター種類 BXM:ブラシレスモーター
② 取付角寸法 2:60 mm 4:80 mm
5:90 mm 6:104 mm
① ② ③ ④ ⑤
③ 出力 (例)120:120 W
④ M :電磁ブレーキ付モーター
⑤ シャフト形状 GFS: GFS歯切りモーター
A、A2: 丸シャフトタイプ
● ギヤヘッド
GFS 5 G 50 FR ① シャフト形状 GFS:GFS歯切り
② 組み合わせモーター 2:60 mm 4:80 mm
取付角寸法 5:90 mm 6:110 mm
① ② ③ ④
③ 減速比 数字:ギヤヘッドの減速比
④ ギヤヘッド種類 なし:平行軸ギヤヘッドGFSギヤ
FR:中空軸フラットギヤヘッドFRギヤ
● ドライバ
BXSD 120 - C 2 ① ドライバ種類 BXSD:BX シリーズドライバ
② 出力 (例)120:120 W
① ② ③ ④ ③ 電源電圧 A:単相100-120 V
C:単相、三相200-240 V
④ 識別品番
● 接続ケーブル、可動接続ケーブル
CC 013 SB F 2 ① ケーブル種類 CC:接続ケーブル
長さ 003:0.3 m 013:1.3 m 023:2.3 m
① ② ③ ④ ⑤ 033
② :3.3 m 053:5.3 m 073:7.3 m
103:10.3 m 153:15.3 m 203:20.3 m
303:30.3 m
③ 適用機種 SB:BX シリーズ
④ F:接続ケーブル R:可動接続ケーブル
⑤ 識別品番
9
Page10
"種類と価格
● モーター ● 電磁ブレーキ付モーター
出力 品名 定価 出力 品名 定価
BXM230-GFS 28,800円 BXM230M-GFS 45,300円
30 W 30 W
BXM230-A2 28,800円 BXM230M-A2 45,300円
BXM460-GFS 30,100円 BXM460M-GFS 46,600円
60 W 60 W
BXM460-A2 30,100円 BXM460M-A2 46,600円
BXM5120-GFS 31,900円 BXM5120M-GFS 53,900円
120 W 120 W
BXM5120-A2 31,900円 BXM5120M-A2 53,900円
BXM6200-GFS 36,800円 BXM6200M-GFS 58,800円
200 W 200 W
BXM6200-A 36,800円 BXM6200M-A 58,800円
BXM6400-GFS 46,200円 BXM6400M-GFS 68,200円
400 W 400 W
BXM6400-A 46,200円 BXM6400M-A 68,200円
● ギヤヘッド
◇ 平行軸ギヤヘッドGFSギヤ ◇ 中空軸フラットギヤヘッドFRギヤ
適用モーター
出力 品名 減速比 定価 適用モーター
出力 品名 減速比 定価
5、10、15、20 10,300円 5、10、15、20 16,500円
30 W GFS2G □ 30、50、100 11,000円 30 W GFS2G □FR 30、50、100 17,600円
200 11,800円 200 18,700円
5、10、15、20 11,500円 5、10、15、20 20,900円
60 W GFS4G □ 30、50、100 12,200円 60 W GFS4G □FR 30、50、100 22,000円
200 12,950円 200 23,100円
5、10、15、20 14,600円 5、10、15、20 25,300円
120 W GFS5G □ 30、50、100 15,500円 120 W GFS5G □FR 30、50、100 26,400円
200 16,400円 200 27,500円
5、10、15、20 19,000円 200 W 5、10、15、20 29,700円
200 W GFS6G □FR
GFS6G □ 30、50 20,000円 400 W 30、50、100 30,800円
400 W
100、200 21,500円
● ドライバ
出力 電源電圧 品名 定価
単相100-120 V BXSD30-A2 32,700円
30 W
単相、三相200-240 V BXSD30-C2 34,900円
単相100-120 V BXSD60-A2 34,700円
60 W
単相、三相200-240 V BXSD60-C2 36,900円
単相100-120 V BXSD120-A2 37,400円
120 W
単相、三相200-240 V BXSD120-C2 39,600円
単相100-120 V BXSD200-A2 37,900円
200 W
単相、三相200-240 V BXSD200-C2 40,100円
400 W 単相、三相200-240 V BXSD400-C2 40,700円
● 接続ケーブル ● 可動接続ケーブル
モーター用 エンコーダ用 モーター用 エンコーダ用
長さ 品名 定価 長さ 品名 定価
0.3 m CC003SBF2 1,100円 1.3 m CC013SBR2 11,100円
1.3 m CC013SBF2 7,200円 2.3 m CC023SBR2 16,200円
2.3 m CC023SBF2 8,800円 3.3 m CC033SBR2 21,500円
3.3 m CC033SBF2 10,300円 5.3 m CC053SBR2 32,000円
5.3 m CC053SBF2 13,400円 7.3 m CC073SBR2 41,800円
7.3 m CC073SBF2 16,500円 10.3 m CC103SBR2 57,900円
10.3 m CC103SBF2 21,100円 15.3 m CC153SBR2 83,900円
15.3 m CC153SBF2 28,800円 20.3 m CC203SBR2 110,800円
20.3 m CC203SBF2 36,500円 30.3 m CC303SBR2 160,300円
30.3 m CC303SBF2 48,600円
ご注意
● モーターから出ているモーターケーブルおよびエンコーダケーブルは、ドライバに直接接続できません。
接続ケーブルまたは可動接続ケーブルを必ずご購入ください。
● 品名中の □には、減速比を表す数字が入ります。
10
Page11
"付属品
タイプ 平行キー 安全カバー 取付用ねじ コネクタ ドライバ取付金具セット
(ねじ付)
モーター - - - - -
平行軸ギヤヘッドGFSギヤ 1本 - 1セット - -
中空軸フラットギヤヘッドFRギヤ 1本 1セット 1セット - -
CN1用コネクタ(1個)
ドライバ - - - CN5用コネクタ(1個) 1組
CN7用コネクタ(1個)
"組み合わせ一覧
④ ③
接続ケーブル ドライバ
可動接続ケーブル
① モーター
② ギヤヘッド
エンコーダ用
モーター用
● モーター・ドライバ間の最大延長距離は、30.7 mです。
● 接続ケーブルまたは可動接続ケーブルを必ずご購入ください。接続ケーブル・可動接続ケーブルともにモーター用とエンコーダ用が2本セットになっています。
モーター ギヤヘッド ドライバ 接続ケーブル
出力 タイプ 可動接続ケーブル
① ② ③ ④
平行軸ギヤヘッドGFSギヤ BXM230 ■ -GFS GFS2G □
空軸フラットギヤヘッドFRギヤ BXM230 BXSD30-A2 C◇SBF2
30 W 中 ■ -GFS GFS2G □FR C
BXSD30-C2 CC◇SBR2
丸シャフトタイプ BXM230 ■ -A2 -
平行軸ギヤヘッドGFSギヤ BXM460 ■ -GFS GFS4G □
中 フラットギヤヘッドFRギヤ BXM460 C◇SBF2
60 W 空軸 ■ -GFS GFS4G SD60-A2 C
□FR BX
BXSD60-C2 CC◇SBR2
丸シャフトタイプ BXM460 ■ -A2 -
平行軸ギヤヘッドGFSギヤ BXM5120 ■ -GFS GFS5G □
120 W 中空軸フラットギヤヘッドFRギヤ BXM5120 CC◇
■ -GFS GFS5G □FR BXSD120-A2 SBF2
BXSD120-C2 CC◇SBR2
丸シャフトタイプ BXM5120 ■ -A2 -
平行軸ギヤヘッドGFSギヤ BXM6200 ■ -GFS GFS6G □
200 W 中空軸フラットギヤヘッドFRギヤ BXM6200 GFS6G BXSD200-A2 CC◇SBF2
■ -GFS □FR BXSD200-C2 CC◇SBR2
丸シャフトタイプ BXM6200 ■ -A -
平行軸ギヤヘッドGFSギヤ BXM6400 ■ -GFS GFS6G □
400 W 中空軸フラットギヤヘッドFRギヤ BXM6400 ■ -GFS GFS6G □FR BXSD400-C2 CC◇SBF2
CC◇SBR2
丸シャフトタイプ BXM6400 ■ -A -
● 電磁ブレーキ付モーターは、品名中の ■ にMが入ります。
品名中の □には、減速比を表す数字が入ります。
品名中の◇には、ケーブルの長さを表す数字が入ります。
11
Page12
平行軸ギヤヘッドGFSギヤ 30 W、60 W、120 W
"仕様
モーター/ BXM230-GFS / GFS2G □ BXM460-GFS / GFS4G □ BXM5120-GFS / GFS5G □
品名 ギヤヘッド 電磁ブレーキ付 BXM230M-GFS / GFS2G □ BXM460M-GFS / GFS4G □ BXM5120M-GFS / GFS5G □
ドライバ BXSD30-A2 BXSD30-C2 BXSD60-A2 BXSD60-C2 BXSD120-A2 BXSD120-C2
定格出力(連続) W 30 60 120
定格電圧 - 相200-240/ 相200-240/ 単相200-240/
V 単相 単
100 120 三相 相100- 単
120 20
00- 単
240 三相 単相100-
2 200- 1
240 三相200-240
電圧許容範囲 −15∼+10% −15∼+10% −15∼+10%
周波数 Hz 50/60 50/60 50/60
電源入力 周波数許容範囲 ±5% ±5% ±5%
定格入力電流 単相:0.8/ 単相:1.4/ 単相:2.3/
A 1.4 三相: 2.2
0.5 三相: 3.7
0.7 三相:1.1
最大入力電流 単相:2.2/ 単相:3.0/ 単相:5.5/
A 4.0 三相: 5.5 9.8
1.3 三相:1.9 三相:3.4
定格回転速度 r/min 3000
速度制御範囲✽1 デジタル設定:2∼4000 r/min(速度比1:2000)
アナログ設定:30∼4000 r/min(速度比1:133)
対負荷 ±0.05% 以下:条件 0∼定格トルク、定格回転速度、定格電圧、常温
速度変動率 対電圧 ±0.05% 以下:条件 定格電圧−15∼+10%、定格回転速度、無負荷、常温
対温度 ±0.05%(±0.5%)✽2以下:条件 使用周囲温度0∼+50˚C、定格回転速度、無負荷、定格電圧
電磁 型式 無励磁作動型、ドライバによる自動制御
ブレーキ部✽3 静摩擦トルク N·m 0.1 0.2 0.4
連続回生電力 W 100
巻き下げ
運転能力✽4 瞬時回生電力 W 240
適用回生抵抗 EPRC-400P(別売)
✽ 1 位置制御モードはデジタル設定のみです。
✽ 2 アナログ設定時の仕様です。
✽ 3 電磁ブレーキ付タイプのみの仕様です。電源のON/OFFでの起動停止は、電磁ブレーキの異常摩耗を起こしますので、おこなわないでください。
✽ 4 回生抵抗使用時の値です。回生抵抗は、放熱板(材質:アルミニウム 350×350 mm 厚さ3 mm)と同等の放熱能力を持つ場所に設置してください。
● 各仕様、特性はモーター単体時の値です。
● 品名中の □には、減速比を表す数字が入ります。
12
Page13
減速比 5 10 15 20 30 50 100 200
回転方向 30 W、60 W、120 W モーターと同方向 モーターと逆方向 モーターと同方向
2 r/min 0.4 0.2 0.13 0.1 0.07 0.04 0.02 0.01
30 r/min 6 3 2 1.5 1 0.6 0.3 0.15
出力軸回転速度[r/min]✽1
3000 r/min 600 300 200 150 100 60 30 15
4000 r/min 800 400 267 200 133 80 40 20
2∼3000 r/min時 0.45 0.9 1.4 1.8 2.6 4.3 6 6
30 W
4000 r/min時 0.34 0.68 1 1.4 1.9 3.2 5.4 5.4
2∼3000 r/min時 0.9 1.8 2.7 3.6 5.2 8.6 16 16
許容トルク[N·m] 60 W
4000 r/min時 0.68 1.4 2 2.7 3.9 6.5 12.9 14
2∼3000 r/min時 1.8 3.6 5.4 7.2 10.3 17.2 30 30
120 W
4000 r/min時 1.4 2.7 4.1 5.4 7.7 12.9 25.8 27
30 W 0.9 1.8 2.7 3.6 5.2 8
瞬時最大トルク[N·m] 60 W 1.8 3.6 5.4 7.2 10.3 17.2 20
120 W 3.6 7.2 10.8 14.4 20.6 34.4 40
2∼3000 r/min時 100 150 200
30 W
4000 r/min時 90 130 180
出力軸先端から 2∼3000 r/min時 200 300 450
60 W
10 mm 4000 r/min時 180 270 420
2∼3000 r/min時 300 400 500
120 W
許容ラジアル 4000 r/min時 230 370 450
荷重[N] 2∼3000 r/min時 150 200 300
30 W
4000 r/min時 110 170 230
出力軸先端から 2∼3000 r/min時 250 350 550
60 W
20 mm 4000 r/min時 220 330 500
2∼3000 r/min時 400 500 650
120 W
4000 r/min時 300 430 550
30 W 40
許容アキシアル荷重[ N] 60 W 100
120 W 150
12 50 110 200 370 920 2500 5000
30 W
(24) (100) (220) (400) (740) (1840) (3750) (7500)
22 95 220 350 800 2200 6200 12000
60 W
許容慣性 (44) (190) (440) (700) (1600) (4400) (9300) (18000)
モーメントJ 45 190 420 700 1600 4500 12000 25000
[×10-4kg·m2]✽2 120 W
(90) (380) (840) (1400) (3200) (9000) (18000) (37500)
30 W 1.55 6.2 14 24.8 55.8 155
瞬時停止時、
瞬時正逆運転時✽3 60 W 5.5 22 49.5 88 198 550
120 W 25 100 225 400 900 2500
✽ 1 出力軸の回転速度は、回転速度を減速比で割った値です。
✽ 2 回転速度3000 r/min以下、加減速時間0.4秒以上のとき、許容慣性モーメントは( )内の値です。
負荷条件によっては、別売りの回生抵抗EPRC-400Pのご使用をおすすめします。回生抵抗➜42ページ
✽ 3 デジタル設定で減速時間を0.1秒未満に設定した場合にも適用されます。
◇ 荷重位置について
ラジアル荷重
アキシアル
荷重
10 mm
20 mm
出力軸先端からの距離
"回転速度―トルク特性
連続運転領域 :連続運転が可能な領域です。
短時間運転領域: 主に加速時に使われる領域です。定格トルクを超える負荷が約5 秒間連続して加わると、過負荷保護機能がはたらき、
モーターは自然停止しますのでご注意ください。
● 30 W ● 60 W ● 120 W
瞬時最大トルク 瞬時最大トルク 瞬時最大トルク
0.2 0.4 0.8
定格トルク 定格トルク 定格トルク
短時間運転領域 短時間運転領域 短時間運転領域
0.1 0.2 0.4
0.075 0.15 0.3
連続運転領域 連続運転領域 連続運転領域
0 0 0
2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000
回転速度[r/min] 回転速度[r/min] 回転速度[r/min]
● 速度制御モードの場合、速度設定方法で速度制御範囲が変わります。位置制御モードの場合は、デジタル設定です。
デジタル設定時:2∼4000 r/min
アナログ設定時:30∼4000 r/min
● 各仕様、特性はモーター単体時の値です。 回転速度―トルク特性は定格電圧時の値です。
13
トルク[N•m]
トルク[N•m]
トルク[N•m]
Page14
平行軸ギヤヘッドGFSギヤ 200 W、400 W
"仕様
モーター / BXM6200-GFS / GFS6G □ BXM6400-GFS / GFS6G □
品名 ギヤヘッド 電磁ブレーキ付 BXM6200M-GFS / GFS6G □ BXM6200M-GFS / GFS6G □
ドライバ BXSD200-A2 BXSD200-C2 BXSD400-C2
定格出力(連続) W 200 400
定格電圧 V 単相100-120 単相200-240/三相200-240 単相200-240/三相200-240
電圧許容範囲 −15∼+10% −15∼+10%
周波数 Hz 50/60 50/60
電源入力
周波数許容範囲 ±5% ±5%
定格入力電流 A 4.7 単相:2.8/三相:1.7 単相:4.7/三相:2.8
最大入力電流 A 11.3 単相:7.1/三相:4.5 単相:9.8/三相:6.4
定格回転速度 r/min 3000
速度制御範囲✽1 デジタル設定:2∼4000 r/min(速度比1:2000)
アナログ設定:30∼4000 r/min(速度比1:133)
対負荷 ±0.05% 以下:条件 0∼定格トルク、定格回転速度、定格電圧、常温
速度変動率 対電圧 ±0.05% 以下:条件 定格電圧−15∼+10%、定格回転速度、無負荷、常温
対温度 ±0.05%(±0.5%)✽2以下:条件 使用周囲温度0∼+50˚C、定格回転速度、無負荷、定格電圧
電磁 型式 無励磁作動型、ドライバによる自動制御
ブレーキ部✽3 静摩擦トルク N·m 0.65 1.3
連続回生電力 W 100
巻き下げ
運転能力✽4 瞬時回生電力 W 800
適用回生抵抗 RGB100(別売)
✽ 1 位置制御モードはデジタル設定のみです。
✽ 2 アナログ設定時の仕様です。
✽ 3 電磁ブレーキ付タイプのみの仕様です。電源のON/OFFでの起動停止は、電磁ブレーキの異常摩耗を起こしますので、おこなわないでください。
✽ 4 回生抵抗使用時の値です。回生抵抗は、放熱板(材質:アルミニウム 350×350 mm 厚さ3 mm)と同等の放熱能力を持つ場所に設置してください。
● 各仕様、特性はモーター単体時の値です。
● 品名中の □には、減速比を表す数字が入ります。
減速比 5 10 15 20 30 50 100 200
回転方向 200 W、400 W モーターと同方向 モーターと逆方向 モーターと同方向
2 r/min 0.4 0.2 0.13 0.1 0.07 0.04 0.02 0.01
出力軸回転速度[r/min]✽1 30 r/min 6 3 2 1.5 1 0.6 0.3 0.15
3000 r/min 600 300 200 150 100 60 30 15
4000 r/min 800 400 267 200 133 80 40 20
2∼3000 r/min時 2.9 5.9 8.8 11.7 16.8 28 52.7 70
200 W
4000 r/min時 2.2 4.3 6.5 8.6 12.4 20.6 38.9 63
許容トルク[N·m]
2∼3000 r/min時 5.9 11.7 17.6 23.4 33.5 55.9 70 70
400 W
4000 r/min時 4.3 8.6 12.8 17.1 24.5 40.9 63 63
200 W 5.9 11.7 17.6 23.4 33.5 55.9 100 100
瞬時最大トルク[N·m]
400 W 11.7 23.4 35.1 45 67.1 85 100 100
出力軸先端 200 W 2∼3000 r/min時 550 1000 1400
許容ラジアル から10 mm 400 W 4000 r/min時 500 900 1200
荷重[N] 出力軸先端 200 W 2∼3000 r/min時 800 1250 1700
から20 mm 400 W 4000 r/min時 700 1100 1400
許容アキシアル荷重[N] 200 W
200 300 400
400 W
200 W 100 460 1000 1700 3900 9300 18000 37000
許容慣性 400 W (200) (920) (2000) (3400) (7800) (18600) (36000) (74000)
モーメントJ
[×10-4kg·m2]✽2 瞬時停止時、 200 W
瞬時正逆運転時✽3 50 200 450 800 1800 5000
400 W
✽ 1 出力軸の回転速度は、回転速度を減速比で割った値です。
✽ 2 回転速度3000 r/min以下、加減速時間0.4秒以上のとき、許容慣性モーメントは( )内の値です。
負荷条件によっては、別売りの回生抵抗RGB100のご使用をおすすめします。回生抵抗➜42ページ
✽ 3 デジタル設定で減速時間を0.1秒未満に設定した場合にも適用されます。
◇ 荷重位置について
ラジアル荷重
アキシアル
荷重
10 mm
20 mm
出力軸先端からの距離
14
Page15
"回転速度―トルク特性
連続運転領域 :連続運転が可能な領域です。
短時間運転領域: 主に加速時に使われる領域です。定格トルクを超える負荷が約5 秒間連続して加わると、過負荷保護機能がはたらき、
モーターは自然停止しますのでご注意ください。
● 200 W ● 400 W
瞬時最大トルク 瞬時最大トルク
1.3 2.6
短時間運転領域 定格トルク 短時間運転領域 定格トルク
0.65 1.3
0.48 0.95
連続運転領域 連続運転領域
0 0
2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000
回転速度[r/min] 回転速度[r/min]
● 速度制御モードの場合、速度設定方法で速度制御範囲が変わります。位置制御モードの場合は、デジタル設定です。
デジタル設定時:2∼4000 r/min
アナログ設定時:30∼4000 r/min
● 各仕様、特性はモーター単体時の値です。 回転速度―トルク特性は定格電圧時の値です。
15
トルク[N•m]
トルク[N•m]
Page16
中空軸フラットギヤヘッドFRギヤ
30 W、60 W、120 W
"仕様
モーター / BXM230-GFS / GFS2G □FR BXM460-GFS / GFS4G □FR BXM5120-GFS / GFS5G □FR
品名 ギヤヘッド 電磁ブレーキ付 BXM230M-GFS / GFS2G □FR BXM460M-GFS / GFS4G □FR BXM5120M-GFS / GFS5G □FR
ドライバ BXSD30-A2 BXSD30-C2 BXSD60-A2 BXSD60-C2 BXSD120-A2 BXSD120-C2
定格出力(連続) W 30 60 120
定格電圧 単相 単相200-240/ 0/ 単相200-240/
V 100-120 三相 相 - 単相200-24
100 120 100-120
200- 単
240 三相 単相
200-240 三相200-240
電圧許容範囲 −15∼+10% −15∼+10% −15∼+10%
周波数 Hz 50/60 50/60 50/60
電源入力 周波数許容範囲 ±5% ±5% ±5%
定格入力電流 単相:0.8/ 単相:1.4/ 単相:2.3/
A 1.4 三相: 2.2
0.5 三相: 3.7
0.7 三相:1.1
最大入力電流 単相:2.2/ 単相:3.0/ 単相:5.5/
A 4.0 三相: 5.5 9.8
1.3 三相:1.9 三相:3.4
定格回転速度 r/min 3000
速度制御範囲✽1 デジタル設定:2∼4000 r/min(速度比1:2000)
アナログ設定:30∼4000 r/min(速度比1:133)
対負荷 ±0.05% 以下:条件 0∼定格トルク、定格回転速度、定格電圧、常温
速度変動率 対電圧 ±0.05% 以下:条件 定格電圧−15∼+10%、定格回転速度、無負荷、常温
対温度 ±0.05%(±0.5%)✽2以下:条件 使用周囲温度0∼+50˚C、定格回転速度、無負荷、定格電圧
電磁 型式 無励磁作動型、ドライバによる自動制御
ブレーキ部✽3 静摩擦トルク N·m 0.1 0.2 0.4
連続回生電力 W 100
巻き下げ
運転能力✽4 瞬時回生電力 W 240
適用回生抵抗 EPRC-400P(別売)
✽ 1 位置制御モードはデジタル設定のみです。
✽ 2 アナログ設定時の仕様です。
✽ 3 電磁ブレーキ付タイプのみの仕様です。電源のON/OFFでの起動停止は、電磁ブレーキの異常摩耗を起こしますので、おこなわないでください。
✽ 4 回生抵抗使用時の値です。回生抵抗は、放熱板(材質:アルミニウム 350×350 mm 厚さ3 mm)と同等の放熱能力を持つ場所に設置してください。
● 各仕様、特性はモーター単体時の値です。
● 品名中の □には、減速比を表す数字が入ります。
16
Page17
減速比 5 10 15 20 30 50 100 200
2 r/min 0.4 0.2 0.13 0.1 0.07 0.04 0.02 0.01
30 r/min 6 3 2 1.5 1 0.6 0.3 0.15
出力軸回転速度[r/min]✽1
3000 r/min 600 300 200 150 100 60 30 15
4000 r/min 800 400 267 200 133 80 40 20
2∼3000 r/min時 0.4 0.85 1.3 1.7 2.6 4.3 8.5 17
30 W
4000 r/min時 0.3 0.64 0.96 1.3 1.9 3.2 6.4 12.8
2∼3000 r/min時 0.85 1.7 2.6 3.4 5.1 8.5 17 34
許容トルク[N·m] 60 W
4000 r/min時 0.64 1.3 1.9 2.6 3.8 6.4 12.8 25.5
2∼3000 r/min時 1.7 3.4 5.1 6.8 10.2 17 34 68
120 W
4000 r/min時 1.3 2.6 3.8 5.1 7.7 12.8 25.5 51
30 W 0.9 1.7 2.6 3.4 5.1 8.5 17 22
瞬時最大トルク[N·m] 60 W 1.7 3.4 5.1 6.8 10.2 17 34 51
120 W 3.4 6.8 10.2 13.6 20.4 34 68 85
2∼3000 r/min時 450 500
30 W
4000 r/min時 410 460
取付面から 2∼3000 r/min時 800 1200
60 W
10 mm 4000 r/min時 730 1100
2∼3000 r/min時 900 1300 1500
120 W
許容ラジアル 4000 r/min時 820 1200 1400
荷重[N]✽2 2∼3000 r/min時 370 400
30 W
4000 r/min時 330 370
取付面から 2∼3000 r/min時 660 1000
60 W
20 mm 4000 r/min時 600 910
2∼3000 r/min時 770 1110 1280
120 W
4000 r/min時 700 1020 1200
30 W 200
許容アキシアル荷重[ N] 60 W 400
120 W 500
12 50 110 200 370 920 2500 5000
30 W
(24) (100) (220) (400) (740) (1840) (5000) (10000)
22 95 220 350 800 2200 6200 12000
60 W
許容慣性 (44) (190) (440) (700) (1600) (4400) (12400) (24000)
モーメントJ 45 190 420 700 1600 4500 12000 25000
[×10-4kg·m2]✽3 120 W
(90) (380) (840) (1400) (3200) (9000) (24000) (50000)
30 W 1.55 6.2 14 24.8 55.8 155
瞬時停止時、
瞬時正逆運転時✽4 60 W 5.5 22 49.5 88 198 550
120 W 25 100 225 400 900 2500
✽ 1 出力軸の回転速度は、回転速度を減速比で割った値です。
✽ 2 各距離からのラジアル荷重は計算式からも算出することができます。➜38ページ
✽ 3 回転速度3000 r/min以下、加減速時間0.4秒以上のとき、許容慣性モーメントは( )内の値です。
負荷条件によっては、別売りの回生抵抗EPRC-400Pのご使用をおすすめします。回生抵抗➜42ページ
✽ 4 デジタル設定で減速時間を0.1秒未満に設定した場合にも適用されます。
◇ 回転方向 ◇ 荷重位置について
前面からみたとき 後面からみたとき ラジアル荷重
フラットギヤヘッド部
フラットギヤヘッド部
アキシアル荷重
10 mm
FWD入力時
RVS入力時 RVS入力時 FWD入力時 20 mm
取付面からの距離
"回転速度―トルク特性
連続運転領域 :連続運転が可能な領域です。
短時間運転領域: 主に加速時に使われる領域です。定格トルクを超える負荷が約5 秒間連続して加わると、過負荷保護機能がはたらき、
モーターは自然停止しますのでご注意ください。
● 30 W ● 60 W ● 120 W
瞬時最大トルク 瞬時最大トルク 瞬時最大トルク
0.2 0.4 0.8
定格トルク 定格トルク 定格トルク
短時間運転領域 短時間運転領域 短時間運転領域
0.1 0.2 0.4
0.075 0.15 0.3
連続運転領域 連続運転領域 連続運転領域
0 0 0
2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000
回転速度[r/min] 回転速度[r/min] 回転速度[r/min]
● 速度制御モードの場合、速度設定方法で速度制御範囲が変わります。位置制御モードの場合は、デジタル設定です。
デジタル設定時:2∼4000 r/min
アナログ設定時:30∼4000 r/min
● 各仕様、特性はモーター単体時の値です。 回転速度―トルク特性は定格電圧時の値です。
17
トルク[N•m]
トルク[N•m]
トルク[N•m]
Page18
中空軸フラットギヤヘッドFRギヤ
200 W、400 W
"仕様
モーター / BXM6200-GFS / GFS6G □FR BXM6400- □FR / GFS6G □FR
品名 ギヤヘッド 電磁ブレーキ付 BXM6200M-GFS / GFS6G □FR BXM6400M- □FR / GFS6G □FR
ドライバ BXSD200-A2 BXSD200-C2 BXSD400-C2
定格出力(連続) W 200 400
定格電圧 V 単相100-120 単相200-240/三相200-240 単相200-240/三相200-240
電圧許容範囲 −15∼+10% −15∼+10%
周波数 Hz 50/60 50/60
電源入力
周波数許容範囲 ±5% ±5%
定格入力電流 A 4.7 単相:2.8/三相:1.7 単相:4.7/三相:2.8
最大入力電流 A 11.3 単相:7.1/三相:4.5 単相:9.8/三相:6.4
定格回転速度 r/min 3000
速度制御範囲✽1 デジタル設定:2∼4000 r/min(速度比1:2000)
アナログ設定:30∼4000 r/min(速度比1:133)
対負荷 ±0.05% 以下:条件 0∼定格トルク、定格回転速度、定格電圧、常温
速度変動率 対電圧 ±0.05% 以下:条件 定格電圧−15∼+10%、定格回転速度、無負荷、常温
対温度 ±0.05%(±0.5%)✽2以下:条件 使用周囲温度0∼+50˚C、定格回転速度、無負荷、定格電圧
電磁 型式 無励磁作動型、ドライバによる自動制御
ブレーキ部✽3 静摩擦トルク N·m 0.65 1.3
連続回生電力 W 100
巻き下げ
運転能力✽4 瞬時回生電力 W 800
適用回生抵抗 RGB100(別売)
✽ 1 位置制御モードはデジタル設定のみです。
✽ 2 アナログ設定時の仕様です。
✽ 3 電磁ブレーキ付タイプのみの仕様です。電源のON/OFFでの起動停止は、電磁ブレーキの異常摩耗を起こしますので、おこなわないでください。
✽ 4 回生抵抗使用時の値です。回生抵抗は、放熱板(材質:アルミニウム 350×350 mm 厚さ3 mm)と同等の放熱能力を持つ場所に設置してください。
● 各仕様、特性はモーター単体時の値です。
● 品名中の □には、減速比を表す数字が入ります。
減速比 5✽1 10 15 20 30 50 100
2 r/min 0.4 0.2 0.13 0.1 0.07 0.04 0.02
30 r/min 6 3 2 1.5 1 0.6 0.3
出力軸回転速度[r/min]✽2
3000 r/min 600 300 200 150 100 60 30
4000 r/min 800 400 267 200 133 80 40
2∼3000 r/min時 - 5.5 8.3 11.1 16.6 27.6 55.3
200 W
4000 r/min時 - 4.1 6.1 8.2 12.2 20.4 40.8
許容トルク[N·m]
2∼3000 r/min時 5.5 11.1 16.6 22.1 33.2 55.3 110
400 W
4000 r/min時 4 8.1 12.1 16.2 24.2 40.4 80.8
200 W - 11.1 16.6 22.1 33.2 55 111
瞬時最大トルク[N·m]
400 W 11.1 22.1 33.2 44.2 66 111 167
取付面から 200 W 2∼3000 r/min時 1230 1680 2040
許容ラジアル 10 mm 400 W 4000 r/min時 1130 1550 1900
荷重[N]✽3 取付面から 200 W 2∼3000 r/min時 1070 1470 1780
20 mm 400 W 4000 r/min時 990 1360 1660
許容アキシアル荷重[N] 200 W
800
400 W
460 1000 1700 3900 9300 18000
200 W -
(920) (2000) (3400) (7800) (18600) (36000)
許容慣性 100 460 1000 1700 3900 9300 18000
モーメントJ 400 W
[×10-4kg·m2]✽4 (200) (920) (2000) (3400) (7800) (18600) (36000)
瞬時停止時、 200 W - 200 450 800 1800 5000 5000
瞬時正逆運転時✽5 400 W 50 200 450 800 1800 5000 5000
✽ 1 出力200Wを除く。
✽ 2 出力軸の回転速度は、回転速度を減速比で割った値です。
✽ 3 各距離からのラジアル荷重は計算式からも算出することができます。➜38ページ
✽ 4 回転速度3000 r/min以下、加減速時間0.4秒以上のとき、許容慣性モーメントは( )内の値です。
負荷条件によっては、別売りの回生抵抗RGB100のご使用をおすすめします。回生抵抗➜42ページ
✽ 5 デジタル設定で減速時間を0.1秒未満に設定した場合にも適用されます。
◇ 回転方向 ◇ 荷重位置について
前面からみたとき 後面からみたとき ラジアル荷重
フラットギヤヘッド部
フラットギヤヘッド部
アキシアル荷重
10 mm
FWD入力時 RVS入力時
RVS入力時 FWD入力時 20 mm
取付面からの距離
18
Page19
"回転速度―トルク特性
連続運転領域 :連続運転が可能な領域です。
短時間運転領域: 主に加速時に使われる領域です。定格トルクを超える負荷が約5 秒間連続して加わると、過負荷保護機能がはたらき、
モーターは自然停止しますのでご注意ください。
● 200 W ● 400 W
瞬時最大トルク 瞬時最大トルク
1.3 2.6
短時間運転領域 定格トルク 短時間運転領域 定格トルク
0.65 1.3
0.48 0.95
連続運転領域 連続運転領域
0 0
2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000
回転速度[r/min] 回転速度[r/min]
● 速度制御モードの場合、速度設定方法で速度制御範囲が変わります。位置制御モードの場合は、デジタル設定です。
デジタル設定時:2∼4000 r/min
アナログ設定時:30∼4000 r/min
● 各仕様、特性はモーター単体時の値です。 回転速度-トルク特性は定格電圧時の値です。
19
トルク[N•m]
トルク[N•m]
Page20
丸シャフト 30 W、60 W、120 W
"仕様
BXM230-A2 BXM460-A2 BXM5120-A2
モーター
品名 電磁ブレーキ付 BXM230M-A2 BXM460M-A2 BXM5120M-A2
ドライバ BXSD30-A2 BXSD30-C2 BXSD60-A2 BXSD60-C2 BXSD120-A2 BXSD120-C2
定格出力(連続) W 30 60 120
定格電圧 240 / 相200-240 /
V 単相 単相200-
100-120 三相 単相 単相200-240 / 単
100-120
200-240 三相 単相100-120
200-240 三相200-240
電圧許容範囲 −15∼+10% −15∼+10% −15∼+10%
周波数 Hz 50 / 60 50 / 60 50 / 60
電源入力 周波数許容範囲 ±5% ±5% ±5%
定格入力電流 単相:0.8 / 単相:1.4 / 単相:2.3 /
A 1.4 三相: 2.2
0.5 三相: 3.7
0.7 三相:1.1
最大入力電流 単相:2.2 / 単相:3.0 / 単相:5.5 /
A 4.0 三相: 5.5
1.3 三相: 9.8
1.9 三相:3.4
定格回転速度 r/min 3000
速度制御範囲✽1 デジタル設定:2∼4000 r/min(速度比1:2000)
アナログ設定:30∼4000 r/min(速度比1:133)
定格トルク N·m 0.1 0.2 0.4
瞬時最大トルク N·m 0.2 0.4 0.8
出力軸先端
から N 87.2 117 156
10 mm
許容ラジアル荷重
出力軸先端
から N 107 137 176
20 mm
許容アキシアル荷重 N 10 20 25
ローター慣性モーメントJ ×10-4kg·m2 0.087 0.24 0.63
許容慣性モーメントJ ×10-4kg·m2 1.5 3 6
対負荷 ±0.05% 以下:条件 0∼定格トルク、定格回転速度、定格電圧、常温
速度変動率 対電圧 ±0.05% 以下:条件 定格電圧−15∼+10%、定格回転速度、無負荷、常温
対温度 ±0.05%(±0.5%)✽2以下:条件 使用周囲温度0∼+50˚C、定格回転速度、無負荷、定格電圧
電磁 型式 無励磁作動型、ドライバによる自動制御
ブレーキ部✽3 静摩擦トルク N·m 0.1 0.2 0.4
連続回生電力 W 100
巻き下げ
運転能力✽4 瞬時回生電力 W 240
適用回生抵抗 EPRC-400P(別売)
✽ 1 位置制御モードはデジタル設定のみです。
✽ 2 アナログ設定時の仕様です。
✽ 3 電磁ブレーキ付タイプのみの仕様です。電源のON/OFFでの起動停止は、電磁ブレーキの異常摩耗を起こしますので、おこなわないでください。
✽ 4 回生抵抗使用時の値です。回生抵抗は、放熱板(材質:アルミニウム 350×350 mm 厚さ3 mm)と同等の放熱能力を持つ場所に設置してください。
◇ 荷重位置について
ラジアル荷重
アキシアル
荷重
10 mm
20 mm
出力軸先端からの距離
"回転速度―トルク特性
連続運転領域 :連続運転が可能な領域です。
短時間運転領域: 主に加速時に使われる領域です。定格トルクを超える負荷が約5 秒間連続して加わると、過負荷保護機能がはたらき、
モーターは自然停止しますのでご注意ください。
● 30 W ● 60 W ● 120 W
瞬時最大トルク 瞬時最大トルク 瞬時最大トルク
0.2 0.4 0.8
定格トルク 定格トルク 定格トルク
短時間運転領域 短時間運転領域 短時間運転領域
0.1 0.2 0.4
0.075 0.15 0.3
連続運転領域 連続運転領域 連続運転領域
0 0 0
2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000 2(30) 1000 2000 3000 4000
回転速度[r/min] 回転速度[r/min] 回転速度[r/min]
● 速度制御モードの場合、速度設定方法で速度制御範囲が変わります。位置制御モードの場合は、デジタル設定です。
デジタル設定時:2∼4000 r/min
アナログ設定時:30∼4000 r/min
● 回転速度―トルク特性は定格電圧時の値です。
20
トルク[N•m]
トルク[N•m]
トルク[N•m]